

 新闻中心
新闻中心 联系我们
联系我们 在线客服
在线客服 公众微信
公众微信


电机知识 /
X-TEAM电机知识科普之伺服电机与普通伺服电机的区别
文章出处:x-teamrc.cn 人气: 发表时间:2022-10-19 11:41
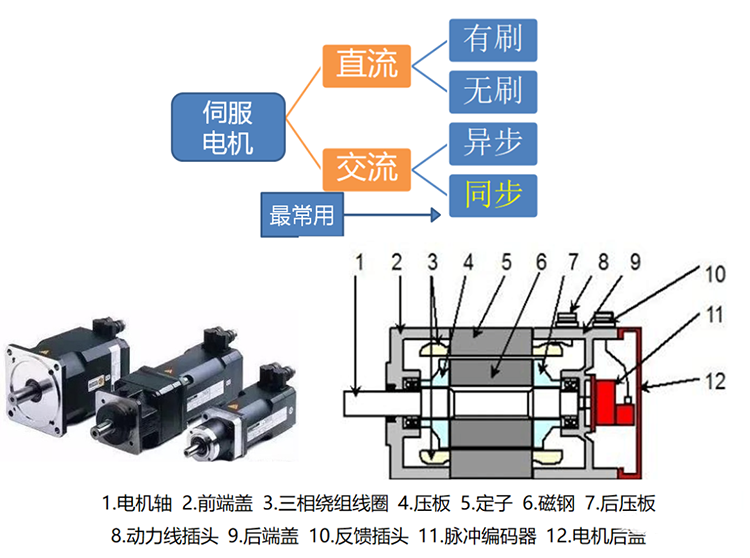
伺服电机(servo motor)也叫执行电机,可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。与步进电机原理结构不同的是,伺服电机由于把控制电路放到了电机之外,里面的电机部分就是标准的直流电机或交流感应电机。
伺服电机靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度。电机每旋转一个角度,编码器都会发出对应数量的反馈脉冲,反馈脉冲和伺服驱动器接收的脉冲形成闭环控制,这样伺服驱动器就能够很精确的控制电机的转动,从而实现精确的定位。
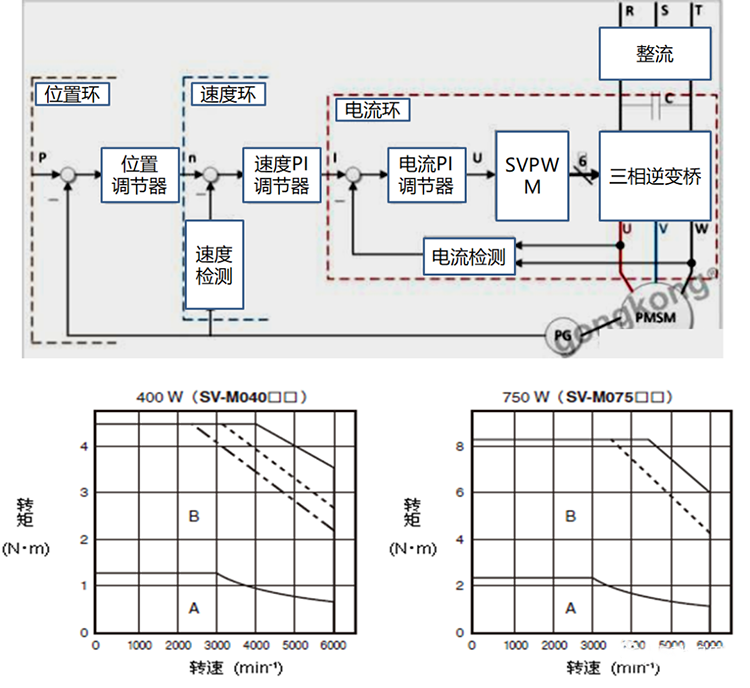
伺服电机的控制:一般工业用的伺服电机都是三环控制,即电流环、速度环、位置环,分别能反馈电机运行的角加速度、角速度和旋转位置。芯片通过三者的反馈控制电机各相的驱动电流,实现电机的速度和位置都准确按照预定运行。交流伺服具备额定转速下力矩恒定的特点,常见200W,400W低中惯量交流伺服额定转速为3000rpm,最高转速5000rpm,转速高。力矩与电流成正比,可以工作在力矩模式,例如锁螺丝,,压端子等需要恒定力矩的场合。交流伺服工作噪音振动极小,发热低。同体积下电机惯量转子惯量小,400W伺服惯量仅相当于57基座2NM步进电机的转子惯量。
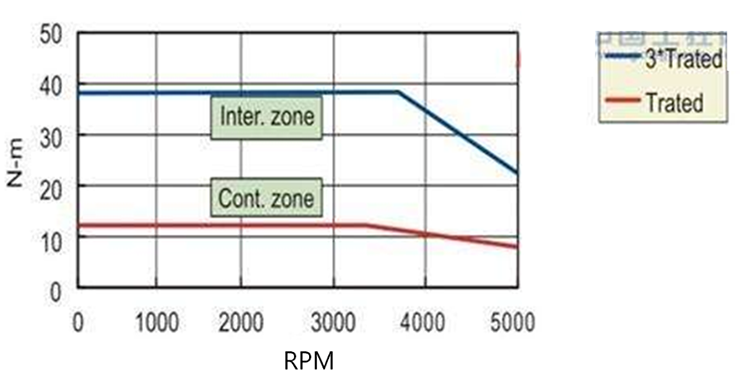
伺服具备短时间过载能力,选型时需考虑加减速时电机过载倍数。伺服采用闭环控制,同闭环步进一样存在位置跟踪误差。伺服需要调试才能使用。步进和伺服电机的原始扭矩不够用的情况下,往往需要配合减速机进行工作,可以使用减速齿轮组或行星减速器。